- All
- Product Name
- Product Keyword
- Product Model
- Product Summary
- Product Description
- Multi Field Search
 |













| MODEL: | |
|---|---|
| Quantity: | |
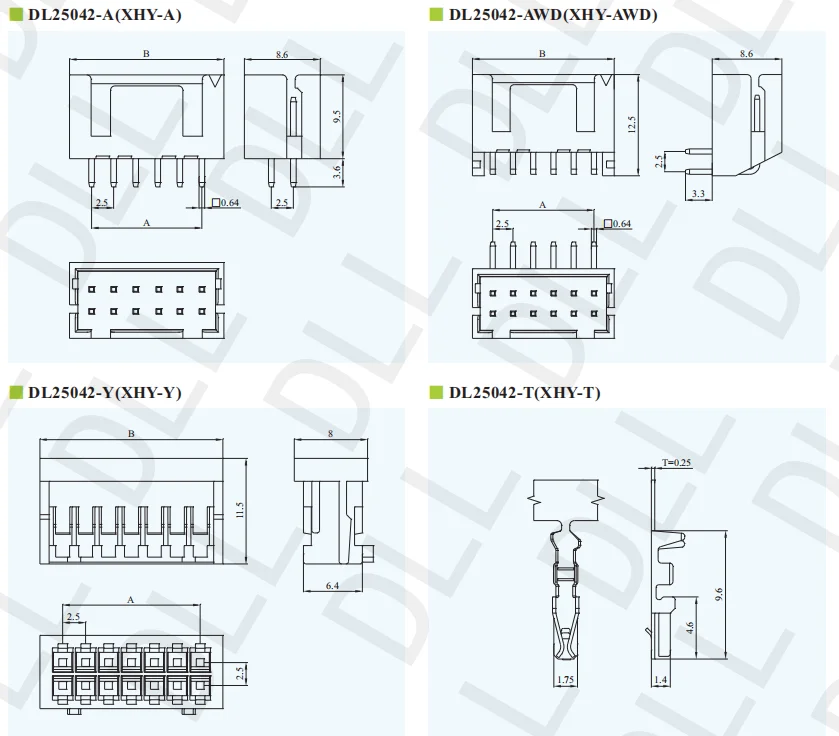
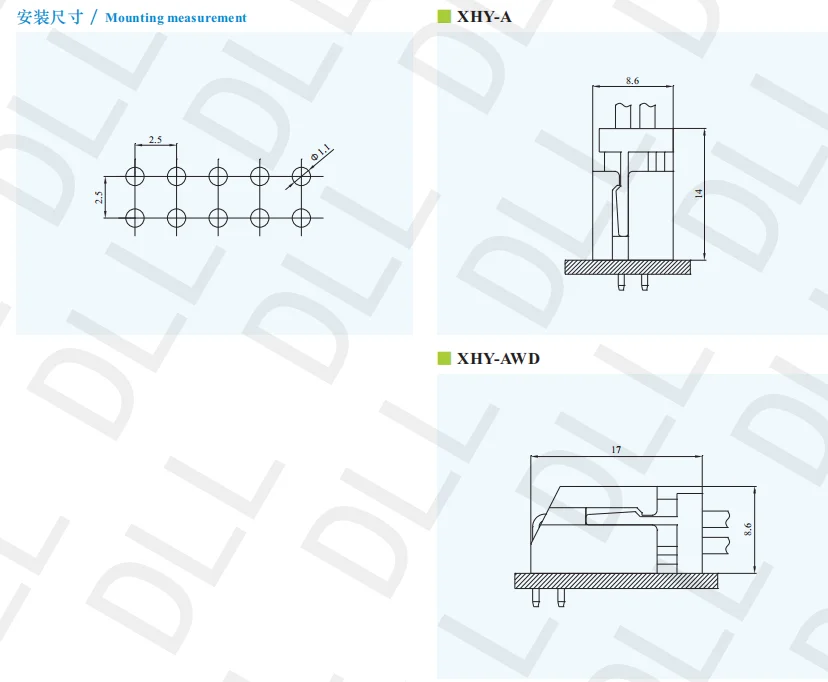
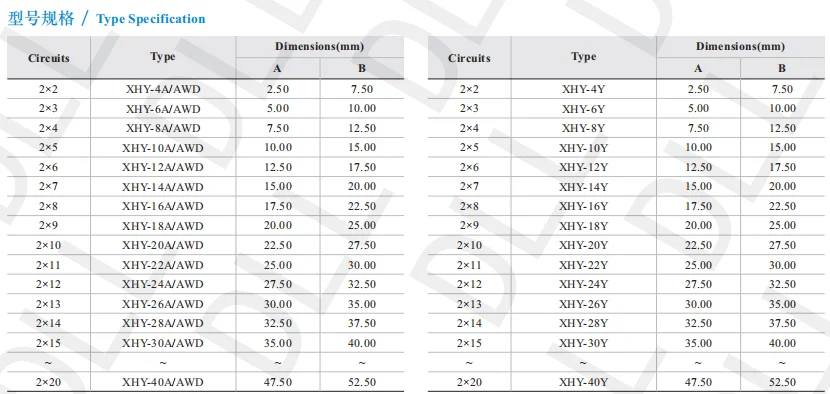
XHY
DLL
SPECIFICATION
DELI
ZHEJIANG DELI CONNECTORS CO.,LTD
replace xhy 2.5mm pin header connector;hrs xhy 2.5mm pin header connector
Rated Voltage: | 250V AC,DC |
Rated current: | 3A AC,DC |
Contact resistance: | 30MΩ max |
Insulation Resistance: | 1000MΩ min |
Withstand Voltage: | 650V AC/minute |
Temperature: | -25℃~+85℃ |
MATERIAL
DELI
ZHEJIANG DELI CONNECTORS CO.,LTD
Housing: | (Nylon) UL94-V0(2) |
Terminal: | Phosphor Bronze,Tin Plated |
Wafer: | (Nylon) UL94-V0(2) |
More Products For You To Choose:

Application
Robot control system: In the joint drive, sensor signal acquisition, and control system of the robot, the XHY straight needle connector can be used to connect components such as motors, encoders, and force sensors. For example, the motor is connected to the joint controller of the robot through a straight pin connector to achieve precise motion control of the joints; The encoder feeds back the position and velocity information of the joint to the control system through a straight needle connector, achieving closed-loop control.
SPECIFICATION
DELI
ZHEJIANG DELI CONNECTORS CO.,LTD
replace xhy 2.5mm pin header connector;hrs xhy 2.5mm pin header connector
Rated Voltage: | 250V AC,DC |
Rated current: | 3A AC,DC |
Contact resistance: | 30MΩ max |
Insulation Resistance: | 1000MΩ min |
Withstand Voltage: | 650V AC/minute |
Temperature: | -25℃~+85℃ |
MATERIAL
DELI
ZHEJIANG DELI CONNECTORS CO.,LTD
Housing: | (Nylon) UL94-V0(2) |
Terminal: | Phosphor Bronze,Tin Plated |
Wafer: | (Nylon) UL94-V0(2) |
More Products For You To Choose:
Application
Robot control system: In the joint drive, sensor signal acquisition, and control system of the robot, the XHY straight needle connector can be used to connect components such as motors, encoders, and force sensors. For example, the motor is connected to the joint controller of the robot through a straight pin connector to achieve precise motion control of the joints; The encoder feeds back the position and velocity information of the joint to the control system through a straight needle connector, achieving closed-loop control.